Roboteranwendungen mit Arduino werden meist mit Servos oder kleinen Gleichstrommotoren betrieben. Beim Einsatz von durchlaufenden Servos (Continous Servos) wird keine externe Ansteuerungselektronik verwendet. Servos können direkt an den digitalen Arduino-Ports angeschlossen und per PWM-Signal angesteuert werden.
Werden für den Antrieb des Roboters kleine Gleichstrommotoren (auch DC-Motoren genannt) verwendet, wird eine Leistungsstufe für die Ansteuerung benötigt, da die Ausgänge des Arduino nicht genügend Strom liefern können und die Motorspannung meist höher als 5 Volt ist. Für das Arduino-Board stehen dazu eine ganze Anzahl Erweiterungsplatinen, sogenannte Shields, zur Verfügung. Diese Shields beinhalten die Ansteuerungslogik und die Leistungsendstufe. An den Ausgängen können dann direkt ein oder mehrere DC-Motoren angeschlossen werden. Häufig verwendete Motor Shields sind der Ardumoto von Sparkfun, das Motor/Stepper/Servo Shield von Adafruit oder das Motor Control Shield von NKC Electronics. Kürzlich wurde das neue Motor Shield R3 vom Arduino Team vorgestellt.
Das Motor Control Shield von NKC habe ich auf einem meiner Testroboter verwendet. Das Shield wird dabei als Bausatz geliefert und kann 2 DC-Motoren ansteuern.
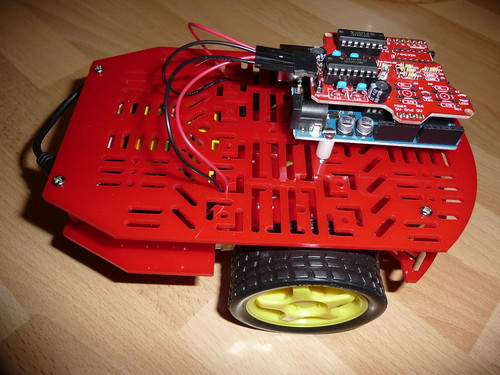
Bild: Roboter mit NKC Motor Shield
Als Chassis für diesen Roboter wurde ein Chassis-Kit von Dragu verwendet, welches neben der Mechanik auch 2 Gleichstrommotoren beinhaltet.
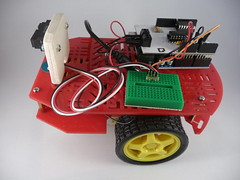
Die einfache Aufbau dieses Roboters kann auch mit Teilen aus der eigenen Werkstatt realisiert werden. Für die beiden Grundplatten kann dabei Sperrholz, Plexiglas oder sogar Karton verwendet werden.
Die Ansteuerung mit einem Arduino-Board und einem Motor Shield wird dabei auf der oberen Platte befestigt.
Für weitere Roboter habe ich das bereits verwendete Motor Shield geplant. Dieses ist aber momentan beim Lieferanten nicht verfügbar. Darum musste eine andere Lösung her. Ich habe nicht für eine fertige Lösung entschieden sondern für eine Selbstbaulösung – ein eigenes Motor Shield, realisiert mit Fritzing.
Entwicklung, Produktion bei Fritzing Fab und Lieferung der Platine hat knapp 3 Wochen gedauert.
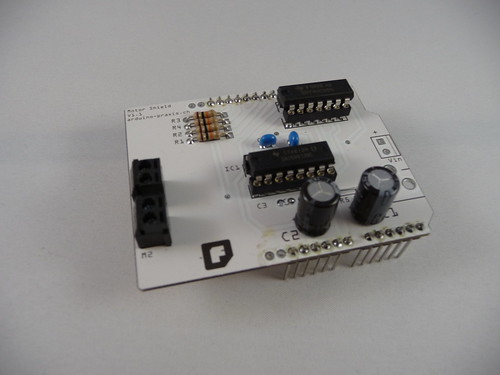
Die Schaltung der Platine habe ich vom Motor Shield von NKC Electronics übernommen und habe somit eine kompatible Lösung zum NKC-Kit.
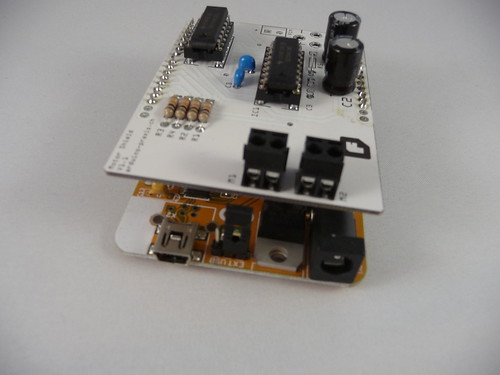
Für den Anschluss der Motoren und der externen Motoren-Versorgungsspannung habe ich Schraubklemmen verwendet. Für die Motorspannung kann die Arduino-Versorgungsspannung oder eine extern zugeführte Spannungsversorgung verwendet werden. Bei Motor-Versorgung über die Spannungsversorgung des Arduino wird die Motorspannung vom Arduino-Board über Pin Vin auf das Motor Shield geführt. Wird eine externe Motorspannung verwendet, muss der Widerstand R5 entfernt werden. Die Motorspannung wird in diesem Fall über die Schraubklemme Vin oder über den Buchsenstecker auf dem Motor Shield zugeführt.
Download des Motor Shield-Projekts auf der Fritzing-Plattform.

4 Responses to “Motor Shield”
Leave a Reply
Suchen
Aktuelles
- Arduino Praxiseinstieg, 5. Auflage erschienen
- Arduino UNO R4 offiziell vorgestellt
- Review: PCB Service von WellPCB
- Review: SMD-Bestückungs-Service von JLCPCB
- Portable Power Supply – VoltBot
- Leiterplatten-Panel bei JLCPCB
- Arduino Praxiseinstieg, 4. Auflage erscheint am 29.04.2019
- Klein, kleiner, ganz klein – ATtiny10
- Review – Leiterplatten (PCB) von JLCPCB
- Arduino Day 2018
Kommentare

Kategorien
Archive
- Dezember 2023
- Juni 2023
- Juli 2020
- Dezember 2019
- Oktober 2019
- Juni 2019
- April 2019
- Juli 2018
- Mai 2018
- November 2017
- Oktober 2017
- September 2017
- Juli 2017
- April 2017
- März 2017
- Februar 2017
- Dezember 2016
- November 2016
- September 2016
- Mai 2016
- Januar 2016
- Dezember 2015
- August 2015
- Mai 2015
- März 2015
- Januar 2015
- Dezember 2014
- September 2014
- August 2014
- Juli 2014
- Juni 2014
- Mai 2014
- April 2014
- März 2014
- Februar 2014
- Januar 2014
- Dezember 2013
- Oktober 2013
- September 2013
- August 2013
- Juni 2013
- Mai 2013
- April 2013
- März 2013
- Februar 2013
- Januar 2013
- Dezember 2012
- November 2012
- Oktober 2012
- September 2012
- August 2012
- Juli 2012
- Juni 2012
- Mai 2012
- April 2012
- Februar 2012
- Januar 2012
- Dezember 2011
- November 2011
- Oktober 2011
- September 2011
- August 2011
- Juli 2011
- Juni 2011
- Mai 2011
- April 2011
- März 2011
- Januar 2011
- Dezember 2010
- November 2010
- Oktober 2010
- September 2010
- August 2010
- Juli 2010
- Juni 2010
- Mai 2010
Super cooles Projekt. Was wird der Roboter machen, wenn er fertig ist?
Der Roboter dient als Basis für verschiedene Testaufbauen und soll noch mit verschiedenen Sensoren wie Endschalter, Abstandssensor, Lichtsensor ausgerüstet werden. Er wird wohl nie wirklich fertig sein. 😉
Die Basis dient u.a. als Modell für einen Roboter-Kurs für Kinder. Dazu teste ich noch verschiedene Materialien.
Auf jeden Fall hat sich gezeigt, dass Fritzing ein ideales Tool ist um auch kleinere Serien von Leiterplatten zu realisieren.
Hallo ;D
Könnte man den Roboter eigentlich auch mit Scratch verbinden. Scratch ist ne Programmiersprache, wo man über so Blöcle programmieren kann.
http://scratch.mit.edu/
WAs mir vorschweben würde, ist von einem Android Smartphone einen kleinen Roboter wie deinen steuern zu können. Vielleicht ne kleine Webcam drauf geschnallt ;D
Bin noch Anfänger, aber sowas wie dein Projekt würde mich sehr reizen ;D
Tschöö
Bogus
Ich habe zwar noch nie etwas mit Scratch gemacht, aber eine kurze Recherche und Beispiele mit Arduino sind gefunden.
Da das angedachte Projekt mehrere verschiedenen Komponenten und Herausforderungen für Anfänger beinhaltet, würde ich mich zuerst in die einzelnen Themen einarbeiten. Dazu musst du dich aber zu allererst mit Arduino und der Programmierung mit dem Arduino-Befehlssatz beschäftigen.
Der erste produktive Schritt könnte dann der Aufbau eines Roboters wie das Beispiel sein, welches dann über eine Smartphone-Steuerung und weiterer Funktionen Schritt für Schritt ausgebaut wird.
Viel Erfolg bei diesem spannenden Projekt. 🙂